안녕하세요
오늘은,,, 원점복귀에 대한 설명을 정리를 하려고 합니다.
저도 초보이기때문에 제가 설명하는 부분이 백프로 다 맞는건 아닙니다ㅎㅎ
원점복귀에 관한 부분을 공부하면서 여기저기 검색해보았지만 원하는 만큼의 정보를 속쉬원하게 찾기가 드릅게ㅎㅎ
어렵더라구요 ㅎㅎ 특히 이 분야는 지식이 곧 돈이기때문에 사람들이 잘 알려주지도 않고..
"메뉴얼 봐" 메뉴얼에 다 나와있다 라고 하는 꼰대들이 엄청 많습니다.
아니!! 메뉴얼봐서 이해가 퐉퐉대면 내가 물어봤겠냐?!!!
초짜니까 물어보는거 아냐!!!(과거 생각하니까 갑자기 혈압 퐉 오르네요^^ㅎ)
암튼 저런식으로 말하면서 아무것도 안알려주고 욕만하면서 일만 시키는 사람들이 참 많은 분야에요
자! 이제 본론으로 들어가서
QD77MS에 대한 원점복귀 방법 소개해드리겠습니다.
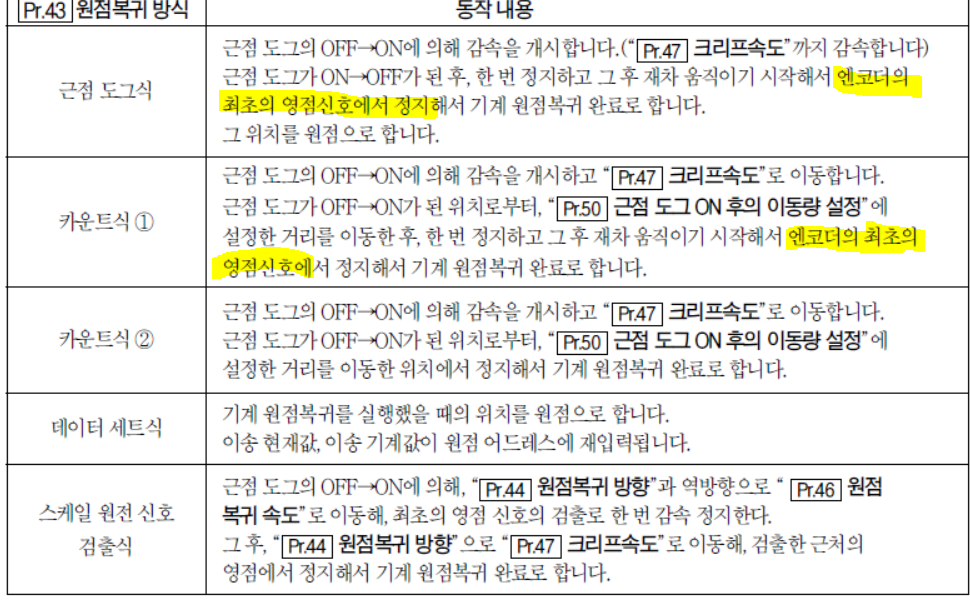
QD77MS에는 총 5가지방법의 원점복귀방식이 있습니다.
1. 근접도그방식
2. 카운트1번
3. 카운트2번
4. 데이터셋
5. 스케일 방식

이중에 5번 스케일 방식은 쓰는 곳을 한번도 못봤어요 ㅠㅠ 그래서 잘못된 정보를 전달할지도 모르니까
5번에 대한 내용은 생략하도록 하겠습니다.
일단 원점복귀방식 설명을 진행하기에 앞서 Z상(영점신호)를 간략하게 설명해 드릴게요.
서보모터는 기본적으로 내장 엔코더를 갖고 있습니다.
엔코더를 이용하여 위치 값에 대하여 피드백 받아서 위치제어를 하는 모터죠
근데 엔코더 내부 구조에는 어느 딱 지점에 Z상이라는 0점 신호를 주는 지점이 있습니다.
그곳을 통과하게되면 바로 Z상이라는 0점 신호가 나옵니다! 이 신호를 따로 모니터링 하거나 할 수 있는건 모르겠어요.
우리가 제어를 하면서 모니터링 할 정도까지는 필요 없습니다ㅎ
Z상을 설명드린 이유는 저 Z상을 이용하여 원점복귀를 하는 방식이 있습니다.
바로 1번 근접도그 방식과, 2번 카운트 1번 방식입니다.(아래 사진 참조)
그럼 Z상을 이용할 때랑 안할때의 차이가 뭐냐,,,라고 하신다면,,,
저도 사실 아직 초짜라 정확하지는 않지만
Z상은 엔코더의 최초의 영점신호로서 엔코더가 1바퀴 회전할 때 딱 한번만 신호가 나옵니다.
이 말은 즉, 항상 똑같은 위치값에서 원점복귀가 완료된다는 의미라고 생각합니다.
1. 근접도그 상세설명
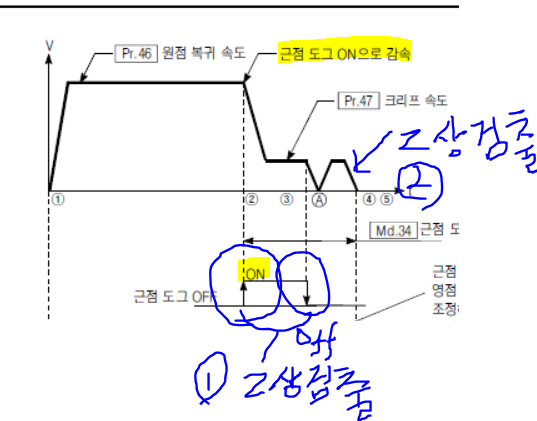
그래프를 보시면 근접도그가 0N 되었을 때 Z상을 찾습니다. 여기서 포인트는 근접도그 센서가 OFF되기전에
Z상을 검출해야되며 Z상을 검출한다음 근접도그를 지나쳐서 센서 감지가 OFF가 되고 그 다음에 더 이동하다가
Z상을 검출한뒤 원점복귀를 종료합니다.
2. 카운트 방식
카운트 방식에는 1번과 2번이 있습니다. 카운트 방식은 근접도그 ON시에 파라미터 상에서 얼마나 이동할건지에 대한
이동량을 설정하는 방법이며, 1번과 2번의 차이는 영점신호 사용과 미사용의 차이입니다.
1) 카운트 1번 방식 상세설명
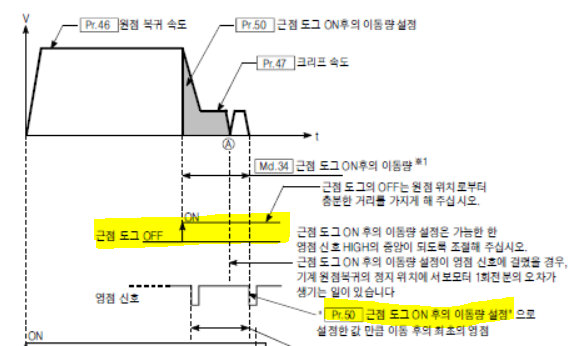
그래프를 보시면 위에 근접도그가 ON 되었을때 영점신호를 찾습니다. 그리고 카운트 이동량 설정만큼 이동하면서
Z상을 추가로 검출하면서 원점복귀를 종료합니다. 이때 근접도그와 눈에띄는 차이는 근점도그 센서가 OFF가되지 않는 상태라는 겁니다.
2) 카운트 2번 방식 상세설명

카운트 2번 방식은 위에도 언급했듯이 Z상을 사용하지 않습니다. 근접도그 센서를 감지한 후 속도 감속하다가
정지합니다.
4. 데이터 셋 방식
이 방식은 뭐 따로 설명드릴것도 없이 원점복귀!! 기동을 때렸을 때 그 위치가 0이 되는 방식입니다.
실제 현장에서 정말 많이 사용하는 방식은 제 경험상 1번 근접도그 방식과, 3번 카운트 2번 방식을 많이 사용합니다.
부족한 점도 많을테지만 초보자 분들은 이 글 읽으시면 원점복귀 방식에 대해 충분히 이해하실 수 있으실 겁니다.
일을 하면서 사수를 만나서 이 원점복귀 방식은 어떤식으로 작동하는 건가요? 라고 물어보면
진짜 대다수의 사람들이 대답을 못해줍니다.. "메뉴얼 봐~" 라고 하시는 분들 중 대다수의 사람들이 몰라서 저런소리를 하는 겁니다..
이 글을 읽으시는 분들은 그런 사수가 되지 마시길 바랍니다.
'PLC > 미쓰비시PLC' 카테고리의 다른 글
| 위치결정카드 QD77MS (0) | 2020.01.30 |
|---|
